北斗系统定位原理
2014.08.14
, 浏览次数: 25804
北斗导航卫星不断地发射导航电文,用户机接收到其中的卫星星历数据,提取出卫星时间与自己的时钟做对比便可得知卫星与用户时间差;再利用导航电文中的卫星星历数据推算出卫星发射电文时所处的三位坐标值;根据空间两点间距离公式 ,列出三个方程式就可以算出用户机所在的三维坐标值。
,列出三个方程式就可以算出用户机所在的三维坐标值。
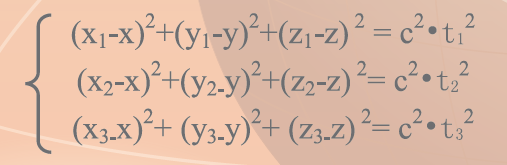
已知:卫星坐标(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3)
卫星与用户机之间的时间差t1、t2、t3
求解:用户机坐标(x,y,z)
解算三元方程式:
实际解算时,在卫星与用户机时间差的测量中,星载钟和用户机钟不可能完全与北斗时同步。 卫星星载钟是原子钟,精度在皮秒级,卫星星载钟之间的时间同步精度也非常高。用户机时钟一般是石英钟,精度高的每秒误差在正负十万分之一秒以内,精度低的每秒误差可以达到万分之一秒。无线电波的速度国际公认值为c=299792458米/秒,电波10个皮秒的运动距离是2.99毫米,十万分之一秒的运动距离是3公里,万分之一秒是30公里。为保证定位精度,就引进了第四个未知数Δt, 即用户机钟与卫星星载钟之间的误差,在计算的时候考虑到这个参数就相当于给用户机时钟校对了时间,得到的距离精度足以够用。这里列出四个方程式就可以解算出用户机所在的三维坐标值x、y、z和精确的时刻误差值Δt,Δt用作精密对时。
已知:卫星坐标(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3)、(x4,y4,z4)
卫星与用户机之间的时间差t1、t2、t3、t4
求解:用户机坐标(x,y,z)、Δt
解算四元方程式:


